

- Modes de pilotage Pulses/Dir ou CW/CCW
- Alimentation 20-80 VDC, pour un courant max. de 8.0A
- convient aux moteurs pas à pas 2 phases NEMA 23, 24, ou 34 équipés d'un encodeur 1000 points
- Boucle fermée, élimine la perte de pas
- No hunting
- Réponse rapide sans overshoot, à-coup ou oscillations
- Torque margin inutile
- Échauffement réduit et meilleur rendement
- Mouvements souples et très silencieux
- Certification CE, conforme à la norme RoHS
Le driver Leadshine CS-D808 est un driver pour moteur pas à pas de nouvelle génération.
Il fonctionne en boucle fermée et assure donc un asservissement de position en temps réel avec des moteurs pas à pas 2 phases équipés de codeurs (taille NEMA 34).
Cette solution combine les avantage des moteurs pas à pas et des servomoteurs grâce à la gestion des encodeurs intégrés aux moteurs.
L'interface de pilotage est similaire à celle d'un driver pour moteur pas à pas classique. Le codeur étant géré directement par le driver, il peut vous retourner un signal d'erreur en cas de blocage mécanique (fenêtre de tolérance paramétrable).
Cette solution apporte donc la fiabilité de positionnement d'un servomoteur mais aussi, une grande simplicité de mise en œuvre.
| CS-D808 | ||||
|---|---|---|---|---|
| Paramètres | Min | Typiques | Max | Unité |
| Courant de sortie | 0,5 | - | 8,0(Pointe) | A |
| Tension de fonctionnement | 30 | 48 ~60 | 80 | VDC |
| Courant des signaux de commande | 7 | 10 | 16 | mA |
| Fréquence entrée Pulse | 0 | - | 200 | kHz |
| Largeur de pulse minimale | 2,5 | - | - | μS |
| Direction minimal setup | 5 | - | - | μS |
| Résistance d'isolation | 500 | MΩ |
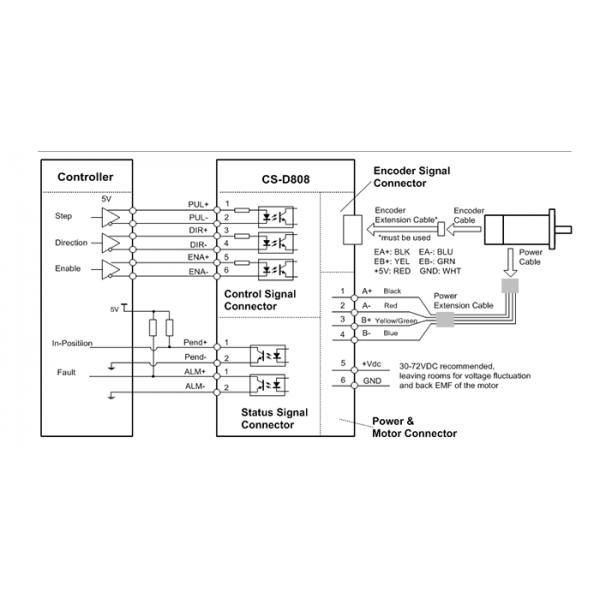
| Affectation des broches de P1 & P2 | |||
|---|---|---|---|
| Pin | Nom | I/O | Description |
| 1 | PUL+ | I | Signal Pulse : En mode pulse & direction, cette entrée correspond au signal pulse. Le signal pulse peut être actif au front montant ou descendant (réglable par le logiciel). En mode CW/CCW double pulse (réglable par le logiciel) cette entrée correspond à la pulse CW (clockwise) et est active aux 2 niveaux HAUT et BAS. Niveaux BAS : 0-0.5V, HAUT : 4.5-24V La largeur d'impulsion doit être supérieure ou égale à 2.5μs. |
| 2 | PUL- | I | |
| 3 | DIR+ | I | Signal Direction : En mode pulse & direction, le signal HAUT ou BAS appliqué à cette entrée sélectionne le sens de rotation du moteur, (e.g. clockwise and counterclockwise). En mode CW/CCW double pulse (réglable par le logiciel) cette entrée correspond à la pulse CCW (counterclockwise ) et est active aux 2 niveaux HAUT et BAS. Niveaux BAS : 0-0.5V, HAUT : 4.5-5V La largeur d'impulsion doit être d'au moins 5μs. Le sens de rotation du moteur est fonction du câblage. Vous pouvez inverser le sens de rotation en agissant sur le switch 5 du DIP switch. |
| 4 | DIR- | I | |
| 5 | ENA+ | I | Entrée Enable : cette entrée sert à activer/désactiver
le driver. Par défaut, si cette entrée est inutilisée, le driver est
activé. La mise a l'état HAUT de cette entrée désactive le driver. Niveaux BAS : 0-0.5V, HAUT : 4.5-5V Cette commande peut être inversée par soft (réglable par le logiciel). Elle peut également être utilisé pour effacer une alarme (réglable par le logiciel). |
| 6 | ENA- | I | |
| 7 | Pend+ | o | Signal In-position : Sortie optocouplée, elle est active lorsque la différence entre la position en cours et la position demandée est égale à 0. Le courant de commande max. est de 20mA sous 24V. |
| 8 | Pend- | o | |
| 9 | ALM+ | o | Sortie erreur : Sortie optocouplée, elle est active en cas de surtension, surintensité ou erreur de poursuite. Le courant de commande max. est de 20mA sous 24V. Par défaut elle passe à l'état HAUT en cas d'erreur. Cette commande peut être inversée par soft (réglable par le logiciel). |
| 10 | ALM- | o |
| Connecteur P3 - Entrée codeur | ||
|---|---|---|
| Pin | Nom | Description |
| 1 | EB+ | Entrée codeur B+ |
| 2 | EB- | Entrée codeur B- |
| 3 | EA+ | Entrée codeur A+ |
| 4 | EA- | Entrée codeur A- |
| 5 | VCC | Sortie +5V codeur |
| 6 | EGND | Sortie 0V (GND) codeur |
| Connecteur P4 - Raccordement Moteur et Alimentation de puissance | ||
|---|---|---|
| Pin | Nom | Détails |
| 1 | A+ | Fil A+ du moteur pas à pas |
| 2 | A- | Fil A- du moteur pas à pas |
| 3 | B+ | Fil B+ du moteur pas à pas |
| 4 | B- | Fil B- du moteur pas à pas |
| 5 | +Vdc | Alimentation de puissance 30-80VDC. |
| 6 | GND | Alimentation de puissance 0V (GND). |
| Port RS23 – RJ11 | |||
|---|---|---|---|
| Pin | Nom | E/S | Description |
| 1 | NC | - | Inutilisée |
| 2 | +5V | O | Sortie +5V. |
| 3 | TxD | O | RS232 émission. |
| 4 | GND | GND | Masse. |
| 5 | RxD | I | RS232 réception. |
| 6 | NC | - | Inutilisée. |
Accessoires
Spécifications
| Marque | Leadshine |
| Tension mini | 24 V |
| Tension maxi | 80 V |
| Courant maxi | 8 A |
| Réglage résolution | DIP-switches |
| Paramétrable | via câble RS232 |
| Réglage du courant | Logiciel de paramétrage |